Utiliser un robot
Carte PICAXE 08
Chapitre 1
Les commandes des moteurs
Fermez la fenêtre de programmation ouverte. Elle correspond à l'écriture des programmes en Basic que nous n'utiliserons pas. Nos programmes seront écrits avec des organnigrammes ou en anglais : Flowchart.
- Cliquez sur l'icône "Flowchart" (Organigramme)

- Si un fenêtre s'ouvre Cliquez sur "Hide this message" puis OK
- Le logiciel est prêt, vous pouvez maintenant écrire votre programme.
C'est le même principe que dans RobotProg, mais les symboles sont un peu différents et ne portent pas le même nom.
Test des sens de rotation des moteurs
On ne peut pas savoir si les fils rouge et noir des moteurs sont branchés dans le bon sens. Vous allez donc dans un premier temps tester les sens de rotation des moteurs avec les commandes out.
Tracer du diagramme de test
Dessinez ce diagramme 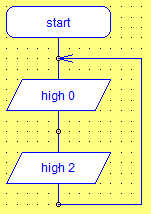 en suivant les instructions ci-dessous :
en suivant les instructions ci-dessous :
- Cliquez sur l'icône Out

- Cliquez sur High

- Posez la croix du symbole High sur le bas de l'extrémité de start

high0 est relié à start
- Recommencez 1 fois pour placer un autre high sous le premier
- Cliquez sur l'icône de Retour aux Outils


- Cliquez sur le 2eme high0 et en bas à gauche de l'écran choisissez la sortie 2
- Cliquez sur l'icône de l'outils ligne
 et relier le bas de high7 au point entre start et high5
et relier le bas de high7 au point entre start et high5
Transférer le diagramme
Avant toute manipulation sur le robot il faut le poser sur une cale pour que les roues ne touchent pas la table. Un programme peut être chargé en mémoire et faire tourner les roues à la mise sous tension. 
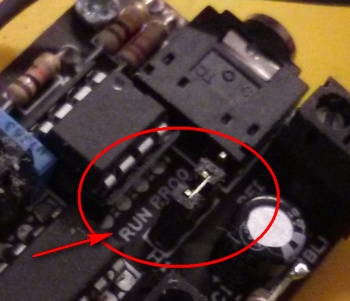
- Repérez le calavier RUN/PROG

- Placez-le sur PROG

- Repérez la prise Jack

- Branchez le jack

- Mettez l'interrupteur sur On (vers la gauche).
- Cliquez sur l'icône "Program"

Le programme est téléchargé le microcontrôleur Picaxe. Le téléchargement s’effectue uniquement si la liaison est correcte (câble Série installé et branché sur le robot, microcontrolleur Picaxe sélectionné dans Option, robot alimenté).
- Quand le téléchargement est fini, cliquez sur OK dans la fenêtre qui s'affiche.
- Les roues doivent tourner
- Arrétez le robot en mettant l'interrupteur sur Off
- Repacez le cavalier sur RUN
Contrôler le sens de rotation
- Mettez l'interrupteur sur On (vers la gauche).
- Vérifiez que les roues tournent dans le même sens et propulsent le robot vers l'avant.
- Sinon :
- Arrêtez le robot en déplaçant l'interrupteur sur Off (vers la droite)
- Intervertissez les 2 fils (rouge et noir) du (ou des) moteur(s) qui tourne(nt) dans le mauvais sens.
- Testez de nouveau le sens de rotation
- Si les roues tournent dans le bon sens arrêtez le robot en déplaçant l'interrupteur sur Off (vers la droite)
Test des commandes des moteurs
Pour faire avancer et manoeuvrer le robot, il faut connaître les différentes commandes à appliquer aux moteurs.
Pour cela vous allez construire et remplir des tableaux de référence qui vous permettront d'appliquer efficacement la bonne commande au bon moment.
Sur le robot
- le moteur M1 est commandé par les sorties S0 et S1
- le moteur M2 est commandé par les sorties S2 et S4
Suivant le niveau (high - low ou 1 - 0) appliqué au 2 sorties d'un moteur, il va tourner dans un sens ou dans l'autre.
Construire l'organigramme suivant
Vous pouvez effacer le précedent.
- Dessinez l'organigramme suivant :
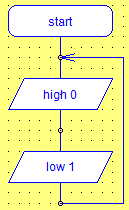
- Transférez l'organigrammes sur le robot (n'oubliez pas de déplacer le cavalier ! voir ici) et testez-le avec le robot sur la cale pour que les roues tournent dans le vide
- Notez les résultats dans le tableau ci-dessous.
- Modifiez les valeurs de high et de low (high2 low4 par exemple)
- Transférez l'organigrammes sur le robot et testez-le avec le robot sur la cale pour que les roues tournent dans le vide
- Notez les résultats dans le tableau ci-dessous.
- Recommencez en utilisant toutes les combinaisons du tableau
sauf celles en rouge.
Remplir le tableau suivant en entourant la bonne option :
| M1 |
S0 |
high |
Avant
Arrière
Arrêt |
S0 |
low |
Avant
Arrière
Arrêt |
S0 |
low |
Avant
Arrière
Arrêt |
S0 |
high |
Combinaison Interdite |
| S1 |
low |
S1 |
high |
S1 |
low |
S1 |
high |
| M2 |
S2 |
high |
Avant
Arrière
Arrêt |
S2 |
low |
Avant
Arrière
Arrêt |
S2 |
low |
Avant
Arrière
Arrêt |
S2 |
high |
Combinaison Interdite |
| S4 |
low |
S4 |
high |
S4 |
low |
S4 |
high |
En déduire les tableaux d'actions suivants en remplissant les cases vides avec high ou low :
| Avancer |
|
Reculer |
|
Arrêter |
| S0 |
|
S0 |
|
S0 |
|
| S1 |
|
S1 |
|
S1 |
|
| S2 |
|
S2 |
|
S2 |
|
| S4 |
|
S4 |
|
S4 |
|
Pour tourner à droite ou à gauche il y a 2 possibilités : soit bloquer une roue et faire tourner l'autre en avant, soit faire tourner une roue en avant et l'autre en arrière. Remplissez les tableaux suivants en notant dans les cases vides high ou low :
| Tourner Droite |
|
Tourner Gauche |
|
| S0 |
|
|
S0 |
|
|
| S1 |
|
|
S1 |
|
|
| S2 |
|
|
S2 |
|
|
| S4 |
|
|
S4 |
|
|
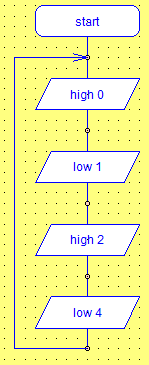 Vous pouvez tester les différentes combinaisons en utilisant l'organigramme ci-contre :
Vous pouvez tester les différentes combinaisons en utilisant l'organigramme ci-contre :
N'oubliez pas que vous ne pouvez pas utiliser la combinaison high0-high1 ou high2-high4 (court-circuit au niveau des moteurs).
Transférez les organigrammes sur le robot et testez-les le robot sur la cale.
Il est temps de passer à vos premiers programmes et de faire circuler le robot.
Suite
